Getting Started
Introduction to developing canisters in C++
This getting started tutorial builds a greet project.
Install icpp-pro
First install icpp-pro as explained in the Installation Guide
Create the greet project
Create the greet starter project with:
icpp init
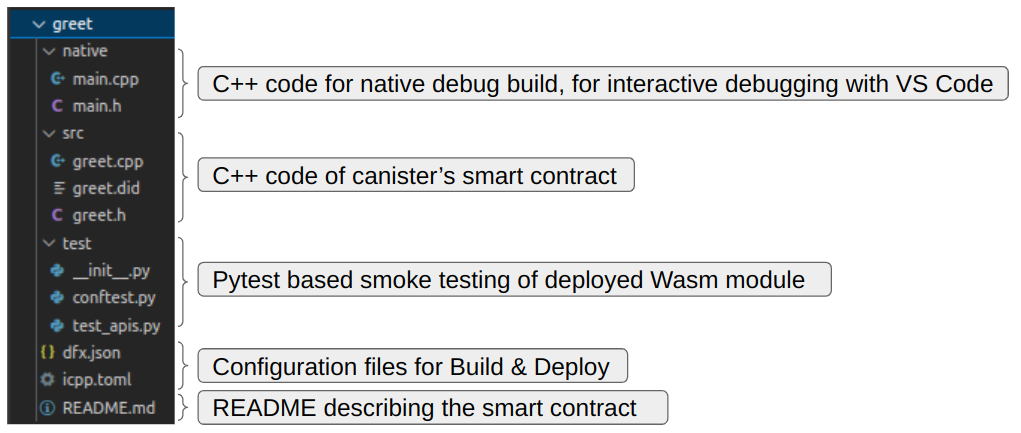
This will create a complete C++ project, with:
demo script
In the root folder of the greet project, you can find a demo script: demo.sh
You can run this script, as demonstrated in this short video:
The sections below explain each step, and show how to run them from the command line.
Start local IC network
Start the local IC network with:
icp network start --background
icp-cli runs a local network per project, so this one belongs to your
greet project and does not collide with the networks of your other projects.
The greet project's icp.yaml sets gateway.port: 0, which makes the OS
assign a free ephemeral port - so the port differs on every start. Read it back
with:
icp network status --environment local --json
There is no --clean flag. A local network keeps its state under .icp/cache,
so to start from scratch:
icp network stop
rm -rf .icp/cache
icp network start --background
Build the WebAssembly file
You compile & link your code with:
icpp build-wasm
icpp will compile the C++ files defined in the icpp.toml file and create a wasm file in the build folder. The name of the wasm file to be created is defined inside icpp.toml .
Deploy
Deploy the build/greet.wasm to a canister in the local network with:
icp deploy --environment local --yes
icp deploys the canisters specified in the icp.yaml file, which declares the
canister, the local network and the environments:
# file: icp.yaml
canisters:
- name: greet
build:
steps:
# icpp build-wasm already produced the wasm, icp just picks it up
- type: pre-built
path: build/greet.wasm
networks:
- name: local
mode: managed
gateway:
port: 0 # let the OS pick a free port, so projects never collide
environments:
# these names are what you pass as `icp ... -e local|ic`
# and as `pytest --network=local|ic` (yes, pytest still spells it --network)
- name: local
network: local
- name: ic
network: ic
Working with static libraries
The greet project has a src folder plus two static libraries:
greet/
|- libhello/
| |- hello.cpp # a C++ file of the static library 'libhello'
| |- hello.h
|- libworld/
| |- world.cpp # a C++ file of the static library 'libworld'
| |- world.h
|- src/
| |- greet.cpp # a C++ file of the smart contract
| |- greet.h # include file used by greet.cpp
| |- greet.did # candid file, containing the canister API spec
The [[build-library]] sections in the icpp.toml file specifies how the libraries must be build:
# file: icpp.toml
[[build-library]]
lib_name = "libhello"
cpp_paths = ["libhello/*.cpp"]
cpp_include_dirs = []
cpp_compile_flags = []
c_paths = []
c_include_dirs = []
c_compile_flags = []
[[build-library]]
lib_name = "libworld"
cpp_paths = ["libworld/*.cpp"]
cpp_include_dirs = []
cpp_compile_flags = []
c_paths = []
c_include_dirs = []
c_compile_flags = []
The following commands are available to work with these static libraries:
# Build everything, including the libraries
icpp build-wasm
# Once you have build all the libraries, and you only changed other code
# you can skip compiling the libraries
icpp build-wasm --to-compile mine-no-lib
# To build just a library. Omit LIBRARY_NAME to build all the libraries
icpp build-library [LIBRARY_NAME]
When you issue the icpp build-wasm command, icpp will first compile & build a static library for each library defined in the icpp.toml file. Each library will be build in it's own folder with name ./build-library/<lib_name/lib_name.a. In our example:
greet/
|- build-library
| |- libhello
| | |- libhello.a
| |- libworld
| | |- libworld.a
Note that there will also be a static library for the internal IC and CANDID code, named __ic_candid__.a. This is built automatically.
Then, icpp will create a wasm file in the build folder. The name of the wasm file to be created is defined inside icpp.toml. In our example:
greet/
|- build
| |- greet.wasm
Test
Test with icp
You can test the APIs from the command line, using icp canister call.
For example, call the greet_2 API of your deployed greet canister with:
icp canister call greet greet_2 '("C++ Developer")' --environment local
# The response will be:
(
"hello C++ Developer!\nYour principal is: .....-..etc..",
)
icp canister call sends an update request by default. That is always correct,
just slower for methods declared query in your .did file - add --query to
send a query request instead:
icp canister call greet greet_2 '("C++ Developer")' --environment local --query
(The pytest smoketest framework picks this automatically - see
Test automation with pytest below.)
Test with Candid UI
You can also test the APIs from your browser, using Candid UI, just by clicking on the link printed by the icp deploy command.
Test automation with pytest
icpp-pro comes with a smoke testing framework.
To run the automated API tests against your locally deployed canister, issue this command:
# from directory: `greet`
# Make sure the canister is deployed as described above.
# Then run the smoke tests using pytest
pytest --network local
=================== test session starts ===================
platform linux -- Python 3.11.13, pytest-7.2.0, pluggy-1.0.0
rootdir: /home/<path>/icpp
plugins: anyio-3.6.2
collected 4 items
test/test_apis.py .. [100%]
==================== 4 passed in 0.13s ====================
Notes:
-
pytestis installed automatically with icpp. -
The value you pass to
--networkis the name of an environment in youricp.yaml. Run pytest from your project directory, so icp can find that file. -
pytestwill automatically detect the test folder:
greet/
|- test/
| |- conftest.py # pytest fixtures
| |- test_apis.py # the API tests
| |- __init__.py # empty file turning `test` into a python package
# -> required by pytest to resolve fixture imports
Debug with VS Code
icpp-pro comes with a native development framework.
build-native
To create a native executable with the build in Mock IC, use the command:
icpp build-native
Run mockic.exe
You can run the native executable directly, with the command:
build-native/mockic.exe
Debug interactively
First, Install & Configure VS Code for use with icpp.
Then set breakpoints in your code and start the debugger.
The MockIC that was included in the executable will run the tests that you specified in native/main.cpp and call your Smart Contract functions as if they're run in a canister.
This allows you to debug your Smart Contract interactively, not having to rely on debug_print statements alone. This speeds up your development process tremendously.
Next Steps
You can find additional Smart Contract examples in the icpp-demos repository.
IC Limitations
For the most part you can write any style of C++20, but the IC has two limitations to be aware of.
No file system
If your C++ code is making use of the file system, you will get an error message during compile time.
icpp uses the wasi-sdk compiler and sometimes, even when you are not using the file-system, the compiled Wasm module still includes functions that use the file-system and as a result it adds external system interfaces that the IC canister system API does not support. You will get an error during deployment to the canister.
To work around that issue, we have implemented traps to stub those functions. This allows you to compile & deploy your code without the system interfaces being added to the Wasm module, and if it so happens that you actually do use them, a trap with a clear message will occur at runtime.
1000 Globals
The IC has a hard limit allowing 1000 globals.
If your compiled Wasm module has more, then you will get this error message during deployment:
$ icp deploy --environment local --yes
...
The Replica returned an error: code 5, message:
"Wasm module of canister rrkah-fqaaa-aaaaa-aaaaq-cai is not valid:
Wasm module defined 2000 globals which exceeds the maximum number allowed 1000."
The wrapping text around it depends on the CLI version, but the Wasm module
defined N globals message comes from the replica and is what to look for.
You can check how many globals are in your compiled Wasm module with these commands:
icpp build-wasm
wasm2wat <path-to-wasm> | grep "(global (;" | wc